人体运动捕捉与人机交互技术正向着更高精度、更多自由度和更自然交互方式快速发展。然而,现有柔性传感方案在实际应用中仍面瓶颈:电阻式与电容式传感器依赖外加电源,易受环境干扰且存在信号漂移;压电式传感器仅能响应动态刺激,难以感知静态姿态变化。柔性压离子传感器因具备自供能、动静态兼容和良好生物相容性而被视为理想方案,但其灵敏度不足、有效角度范围狭窄以及只能识别单一自由度形变,难以满足复杂人体运动捕捉的需求。
近日,中国科学院上海硅酸盐研究所孙静研究员团队的王冉冉研究员和程荫特聘研究员与新加坡国立大学Ho Ghim Wei教授进行合作,针对上述问题,提出并实现了一种材料-结构协同优化的 SPIM 柔性压离子传感器设计策略,在灵敏度、检测范围与多自由度运动解析能力方面实现系统性突破。相关研究以“Ultrasensitive multi-degree-of-freedom piezoionic sensor via synergistic hydrogel-ion interactions”为题发表于Nature Communications期刊。
在材料层面,研究团队通过向两性离子水凝胶(PSA)中引入不同类型锂盐构建了多种水凝胶–离子体系。研究发现,离子与聚合物极性基团之间的离子–偶极相互作用可有效诱导稳定、连续的离子迁移;同时,聚合物链段的空间位阻效应显著放大正负离子迁移率的不对称性,即使微小机械形变也可转化为可观的电势输出。密度泛函理论计算表明,Li+与PSA中SBMA基团的结合能(-4.3 eV)明显强于其与水分子的结合(-1.6 eV),为高效离子传输提供驱动力;分子动力学模拟证实了该体系具有更高的离子扩散系数。多尺度理论与实验结果相互印证,使传感器在小角度弯曲区间实现了3.2 mV/度的超高灵敏度,显著优于已报道的压离子及其它柔性传感器。
在器件可靠性方面,传感器的机械、电学与界面性能得到优化。PSA水凝胶的杨氏模量约为14 kPa,与人体皮肤高度匹配,在50%-450% 应变范围内经历多次循环拉伸后表现出优异的弹性恢复能力。电极采用eTPU-AgNP 纳米网格结构,在反复弯折和拉伸条件下仍保持稳定导电性能。PSA-Li(TFSI) 水凝胶与电极之间通过氢键、离子-极性相互作用及静电引力形成强界面耦合,其粘附强度高达27 kPa,为传感器在长期动态佩戴中的结构完整性与信号稳定性提供可靠保障。
在此基础上,研究团队通过结构层面的创新设计解决了多自由度运动识别这一核心难题。传感器采用四棱柱形 PSA-Li(TFSI) 水凝胶纤维,并与对称分布的纳米网格电极协同构型,使不同方向的弯曲形变在电信号空间中实现有效解耦。实验结果表明,该传感器不仅可在6°的微小弯曲下输出稳定可辨的信号,还能在0-180°的宽角度范围内保持良好线性响应;其响应时间约为200 ms,恢复时间约为100 ms,覆盖了人体关节0.05-4 Hz的自然运动频率,经10,000次循环测试后仍保持稳定输出。
SPIM 传感器成功实现了腕关节复杂运动的实时捕捉与数字孪生重建,可同步解析屈曲/伸展、外展/内收及顺时针/逆时针环转等多种复合动作。单一紧凑传感器即可实现单关节驱动的虚拟现实复杂交互:佩戴者仅通过自然的腕部运动,即可完成虚拟场景中的转向、加速和变道等操作,很好展示了其在沉浸式人机交互中的高效性与直观性。
该研究为高性能柔性压离子传感器提供了清晰的设计范式,有望在精准生物力学分析、可穿戴运动监测以及新一代VR/AR与元宇宙交互接口等领域展现广阔应用前景。
相关工作得到了国家重点研发计划、国家自然科学基金、中国科学院基础研究领域青年科学家项目、上海市科学技术委员会上海国际科技合作项目、新加坡教育部学术研究基金的支持。
论文第一作者是上海硅酸盐所博士生方悦、硕士生欧阳昊与程荫特聘研究员,通讯作者为程荫特聘研究员、Ho Ghim Wei教授和王冉冉研究员。
文章链接为:https://doi.org/10.1038/s41467-025-67613-8
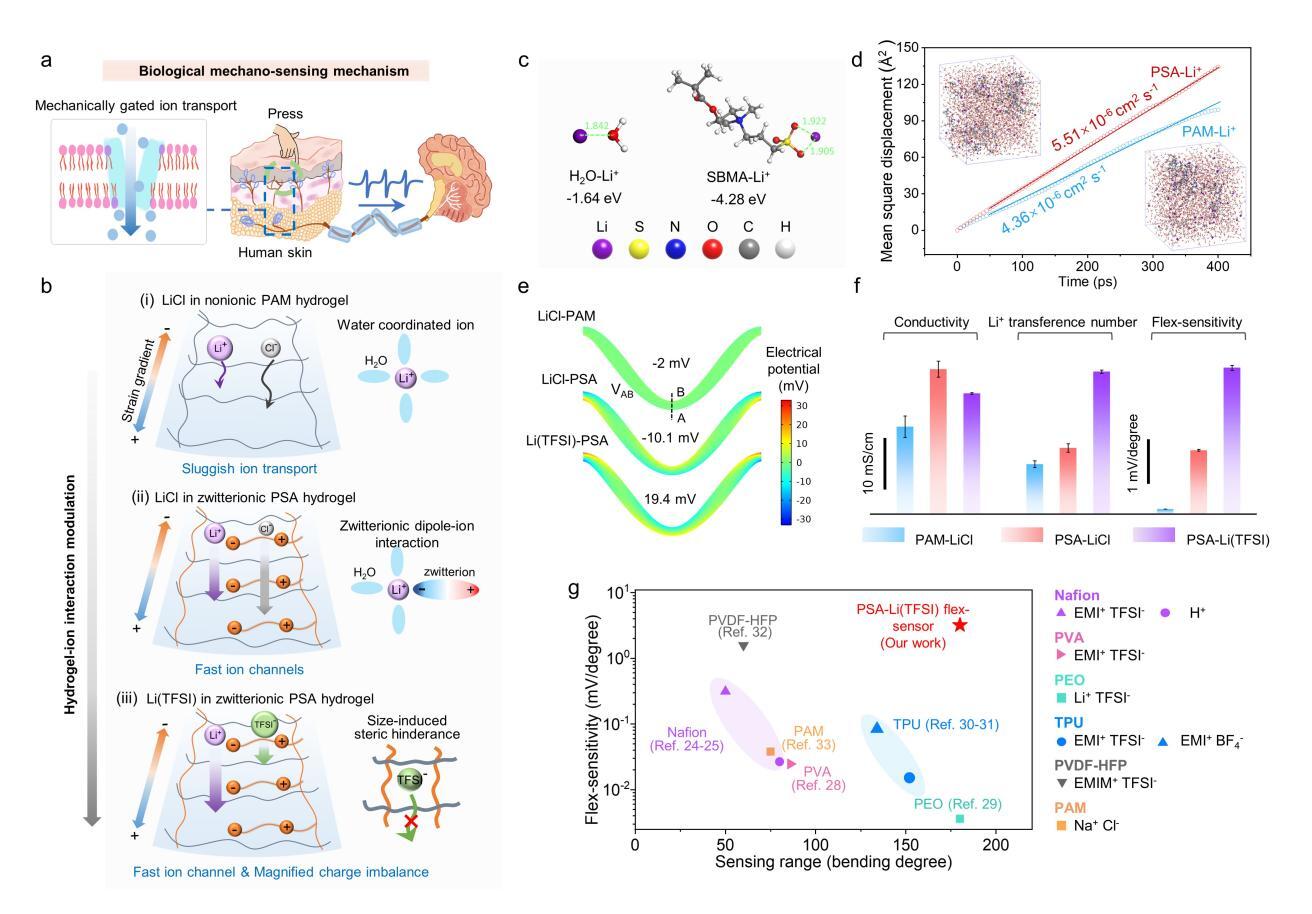
图1. SPIM柔性传感器的设计及超高灵敏度的机理分析
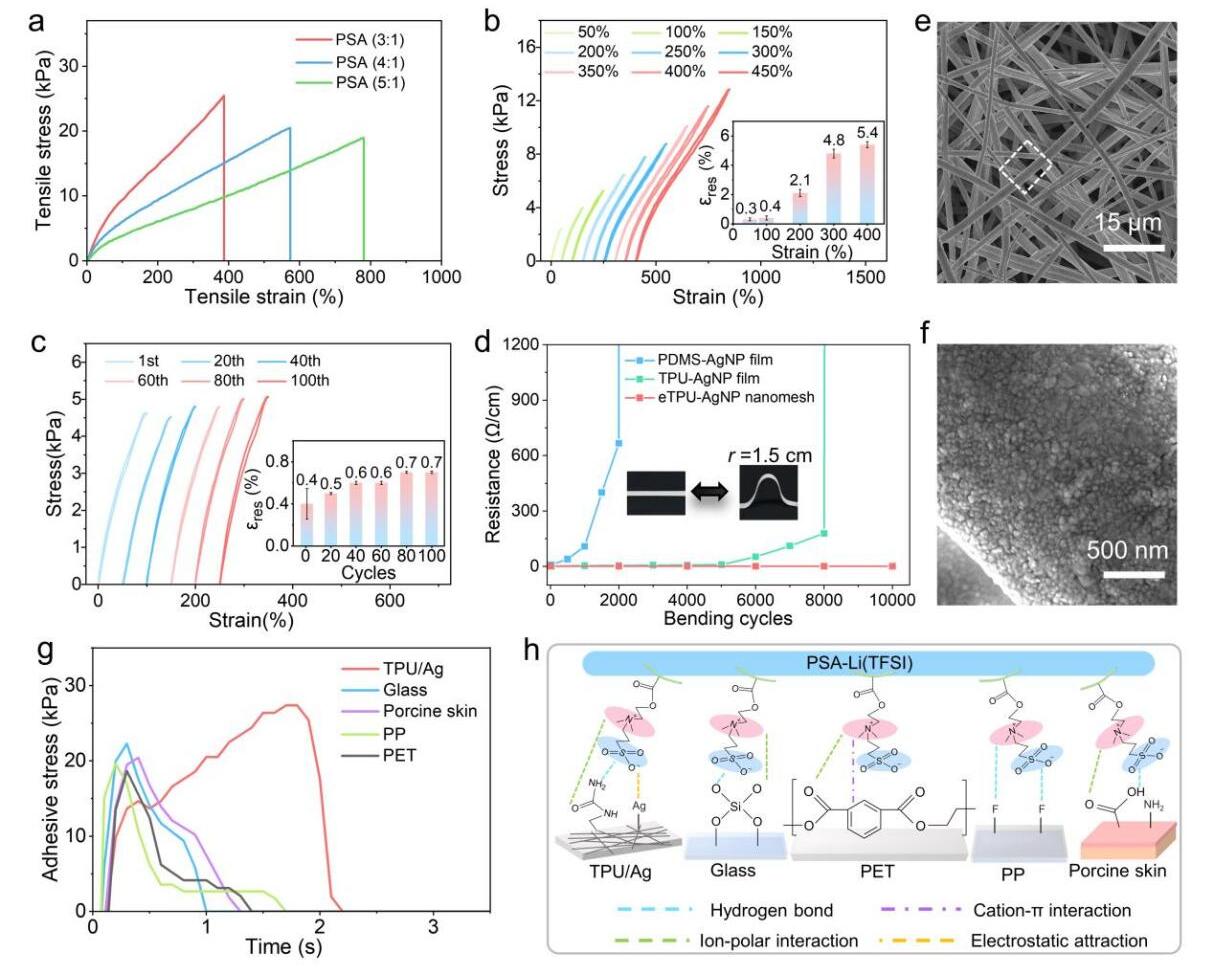
图2. 机械/电气韧性与界面韧性
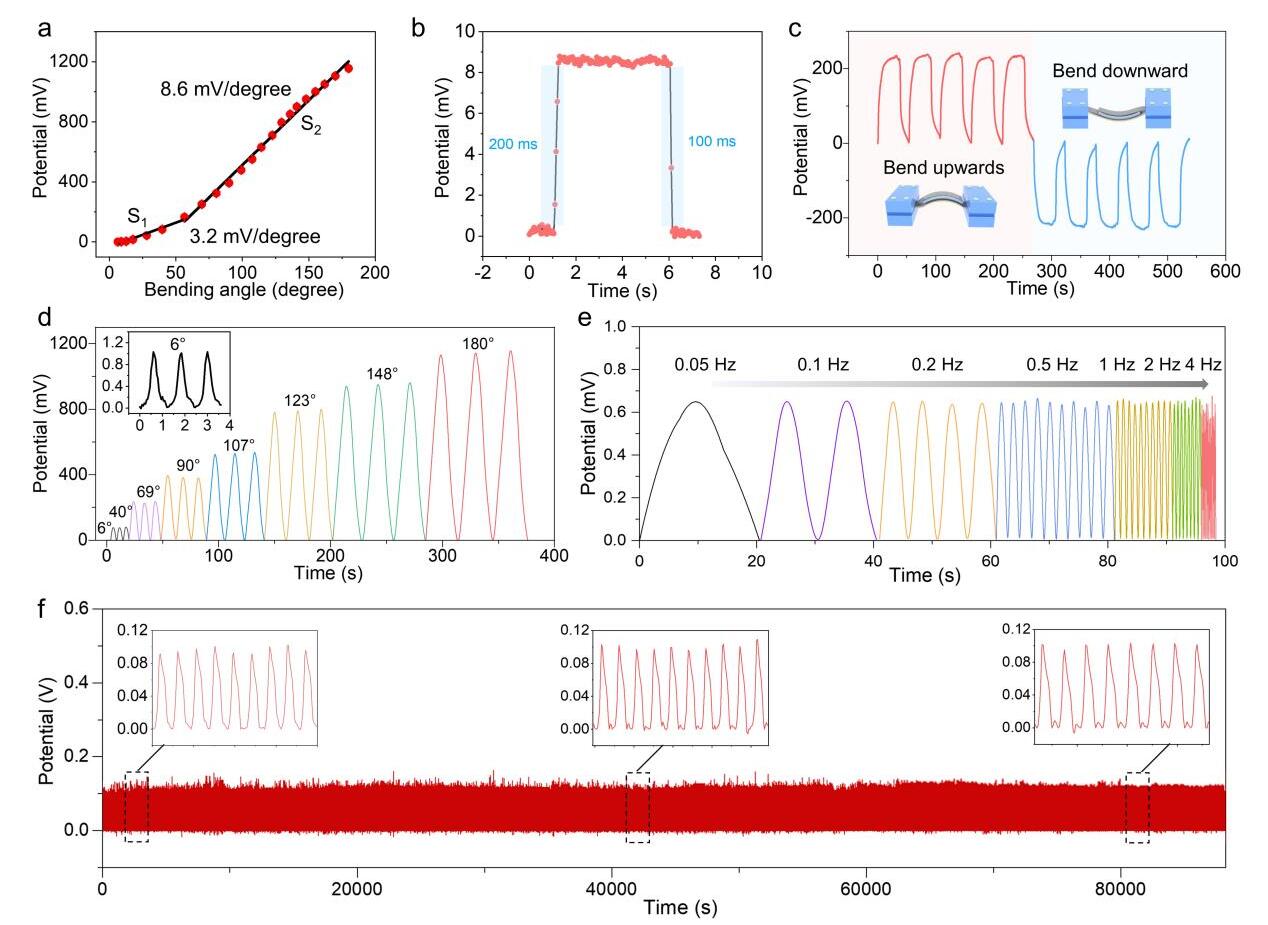
图3. PSA-Li(TFSI)的传感性能
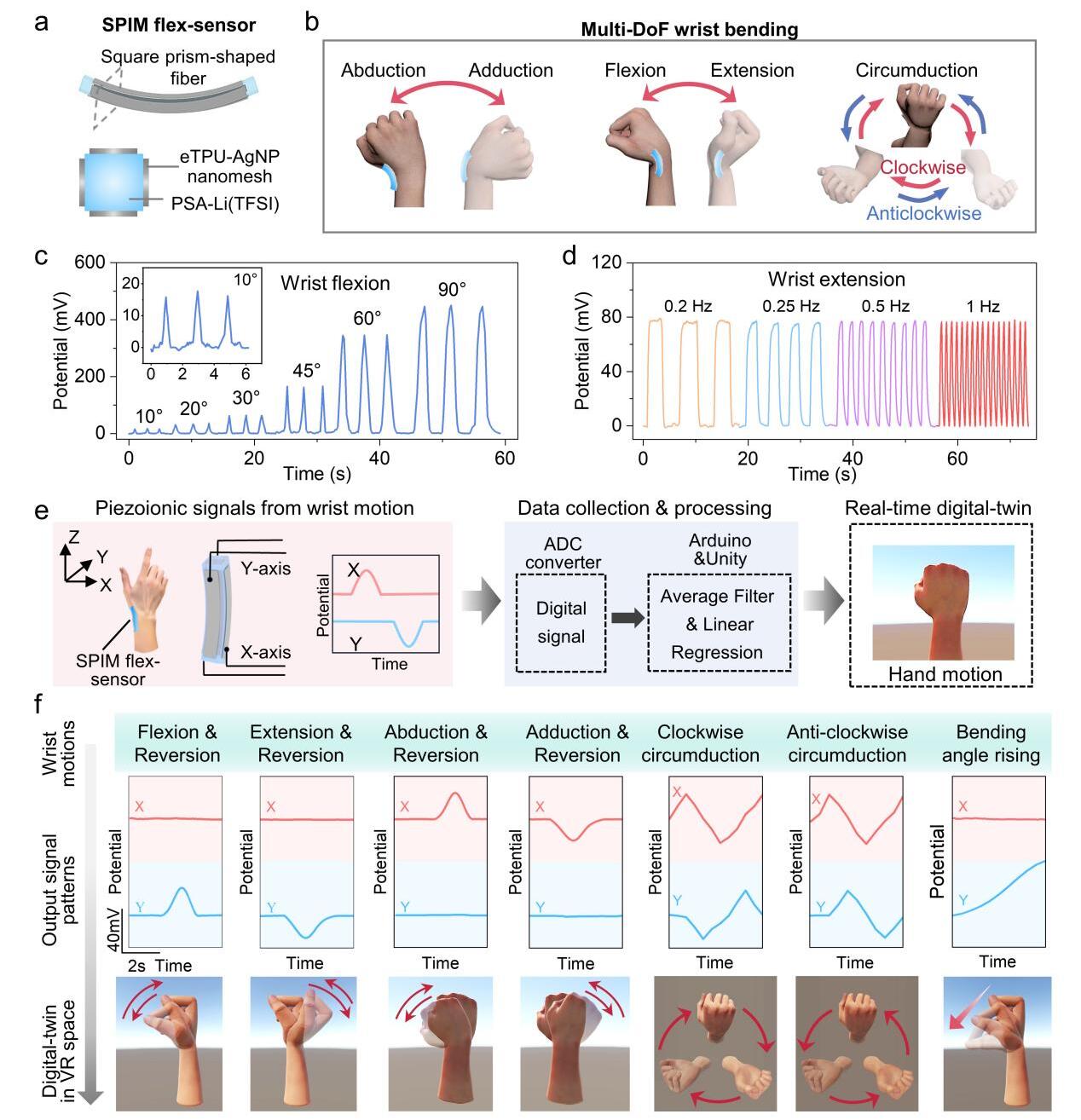
图4. 自由姿势手部运动的数字孪生
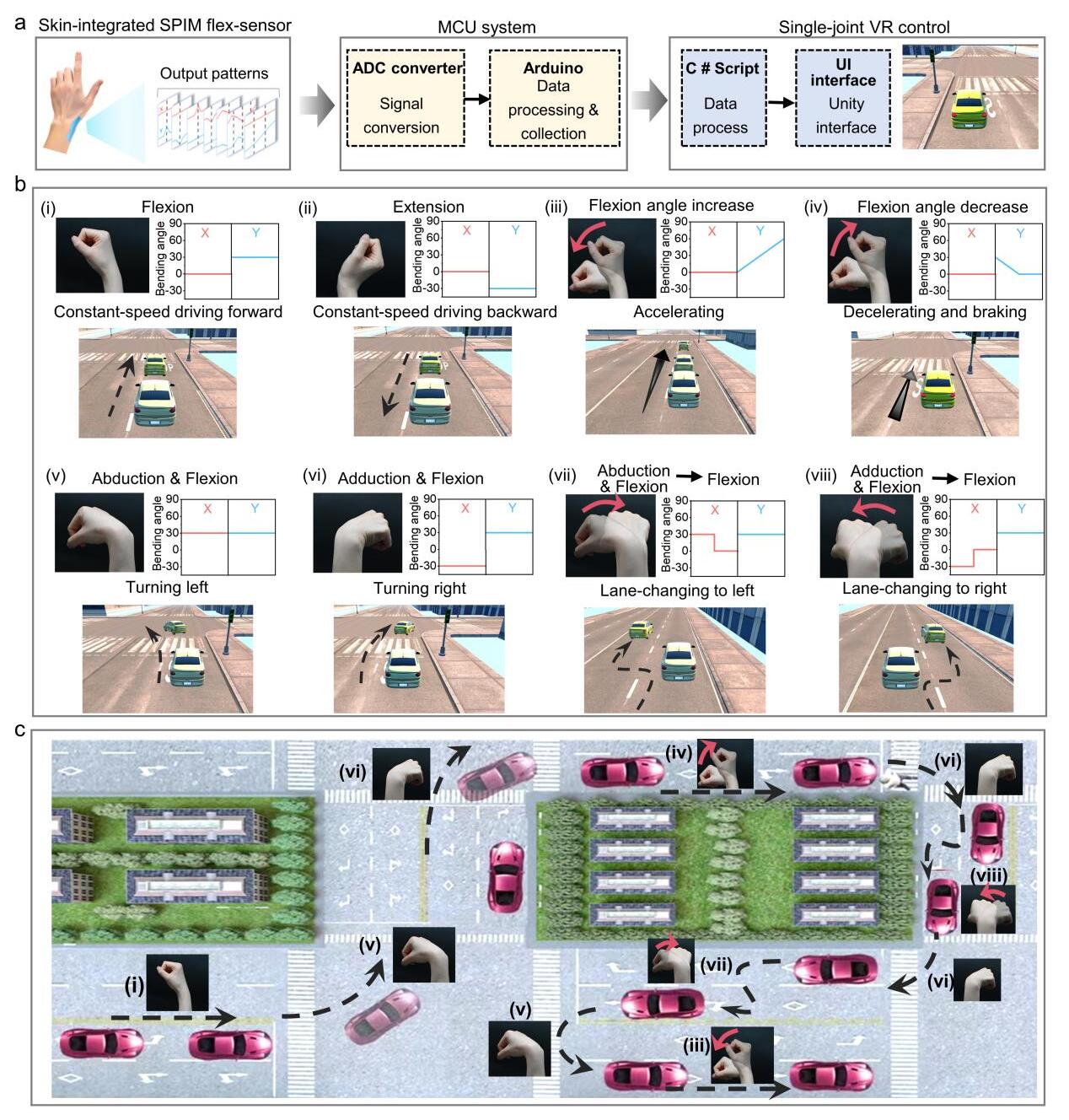
图5. 单一紧凑传感器实现单关节虚拟现实控制

